Next: Exercise Up: Linear Differential Equations Previous: Linear Differential Equations Contents Index
The differential equation of the form

 is called the coefficient function.
is called the coefficient function.
 is called the input function.
is called the input function.
If
 , then the differntial equation is called the homogeneous equation.
, then the differntial equation is called the homogeneous equation.
We denote the left-hand side as  . Then the differential equation is expressed as
. Then the differential equation is expressed as

 is called the differential operator and has linearlity. That is for any solutions
is called the differential operator and has linearlity. That is for any solutions
 and constants
and constants
 ,
,

We review the vector space.
A sum of two vectors A and B is expressed as A  B and is equal to the diagonal of the parallelogram formed by A and B.
B and is equal to the diagonal of the parallelogram formed by A and B.
1. A sum of two vetors is a vector (closure)
2. For any vectors A and B,A+B = B+A (commutative law)
3. For any vectors A,B,C, (A+B)+C = A+(B+C) (associative law)
4. Given any vector A, there exists a vector 0 satisying A+0 = A (existence of zero)
5. Given any vector A, there exists a vector B satisfying A+B = 0 (existence of inverse)
6. A scalar multiplication of a vector is a vector
7. For any real numbers  and
and  , (A) = (
, (A) = (
 )A (associative law)
)A (associative law)
8. For any real numbers and , (
 )A = A + A and for any vectors A and B, (A+B) = A + B (distributive law)
)A = A + A and for any vectors A and B, (A+B) = A + B (distributive law)
9. 1A = A; 0A = 0; 0 = 0 (1 is multiplicative identity)
Let  be the set of continuous functions on the interval
be the set of continuous functions on the interval  . Let
. Let  be the set of piecewise continuous functions on , 2.1
be the set of piecewise continuous functions on , 2.1
 is continuous on },
is continuous on },
 is piecewise continuous on }.
is piecewise continuous on }.
For and  in or , we define the addition on the scalar multiplication as follows:
in or , we define the addition on the scalar multiplication as follows:
1.  is a function of
is a function of  whose value is equal to
whose value is equal to  .
.
2.  is a function of whose value is equal to
is a function of whose value is equal to
 .
.
 , find
, find
 .
.
SOLUTION


with the operation defined above is a vector space. Then the function belongs to is called a vector.
Proof
The solutions of a homogeneous differential equation are differentiable. Thus, the set of solutions are the subset of continuous functions. Then to show is a vector space, it is enough to show the linear combination of the solutions  and
and  is a solution.
Let
is a solution.
Let
 . Then
. Then
 |
 |
 |
|
|
 |
||
|
 |
||
|
0 |
 is again a solution.
is again a solution.
The set of solutions of homogeneous equation becomes a vector space. So, we call this solution space.
 independent solutions of homogeneous differential equation.
independent solutions of homogeneous differential equation.
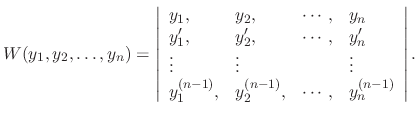
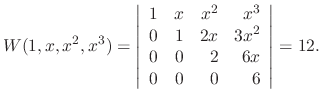
The determinant of the following matrix is called Wronskian determinant. Let  be the solutions of the differential equation. Then
be the solutions of the differential equation. Then
 are the solutions of the homogeneous equation on the interval
are the solutions of the homogeneous equation on the interval ![$[a,b]$](img46.png) , then
, then
 is either 0 or never 0 0n the interval .
is either 0 or never 0 0n the interval .
Proof
For  Since
Since  and
and  are solutions of
are solutions of
 , we have
, we have
 |
|
 |
|
|
 |
||
|
 |
 . Multiplying
. Multiplying  to get
to get
 constant
constant
 . Then
. Then
 and
and

are solutions of the homogeneous differential equation on , then the following conditions are equivalent.
 are linearly independent on the interval .
are linearly independent on the interval .

Proof
For , let the linear combination of and be 0. Then
 . Then
. Then
 and
and  .
.
 are linearly independent, then
are linearly independent, then
 . Thus,
. Thus,
 . Conversely, if
, then
. Thus,
are linearly independent
. Conversely, if
, then
. Thus,
are linearly independent
 .
.
SOLUTION
The dimension of the solution space is 3.
 are solutions of the differential equation. So, we need to show they are linearly independent.
are solutions of the differential equation. So, we need to show they are linearly independent.

 is a solution of
is a solution of
 . Then find the fundamental solution.
. Then find the fundamental solution.
SOLUTION
Since
 |
|
 |
|
|
 |
||
|
 |
 implies that
implies that
 .
.

 are fundamental solutions.
are fundamental solutions.
 is an particular solution of the-order linear differential equation
is an particular solution of the-order linear differential equation
 and
and  is the general solution of
is the general solution of  . Then
. Then
 is the general solution of
.
is the general solution of
.
Proof
By the assumption,
 . Now by the linearlity of , we have
. Now by the linearlity of , we have

 is a solution of
. Since
is a solution of
. Since  contains constants,
contains constants,
 is the general solution.
is the general solution.
is called the complementary solution. By this theorem, if an particular solution of
is found, then to find the general solution, it is enough to find a complementary solution of .
 is an particular solution of
is an particular solution of
 . Then find the general solution.
. Then find the general solution.
SOLUTION
Since
 ,
. Also, the complementary solution of is given in example2.2. Thus
,
. Also, the complementary solution of is given in example2.2. Thus
If is given as a sum of  and
and  , then it is better to consider
, then it is better to consider
 and
and
 .
.
 is a solution of
, and
is a solution of
, and  is a solution of
. Then
is a solution of
. Then
 is a solution of
is a solution of
 .
.Proof.

For example, to find the general solution of the differential equation
 of
of
 of
of
 of
of
![\begin{figure}\begin{center}
\includegraphics[width=14cm]{DFQ/Fig0-1.eps}
\end{center}\vspace{-1.6cm}
\end{figure}](img500.png)